力覚センサを介したひも操作による移動ロボットの誘導走行
移動ロボットに搭載した力覚センサにキャスタを介してひもをつなぎ,
人間がひもを引くとその力の大きさと方向を検出することでロボットを誘導走行させる実験システムを構築した.
ロボットは軽い牽引力で自由に誘導でき,音声出力によりロボットの状態を人間に伝えることで操作性を向上させられることを実験で確認した.
これにより確実に人間を追尾して荷物運搬をする移動ロボットの実現可能性を示した.
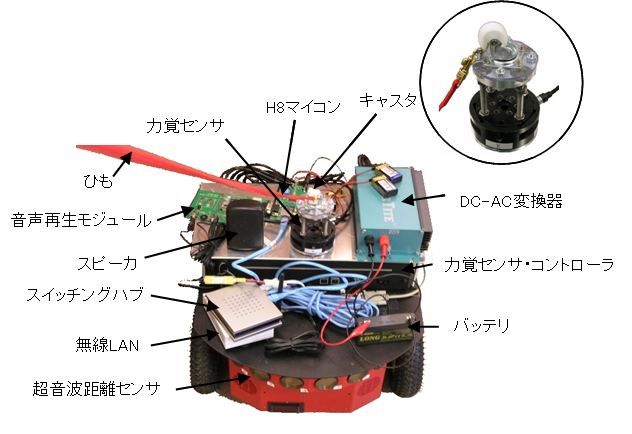
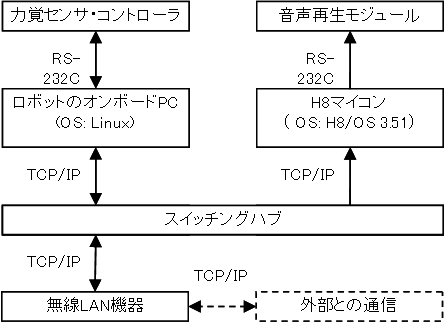
機器搭載移動ロボット実験システムとその構成
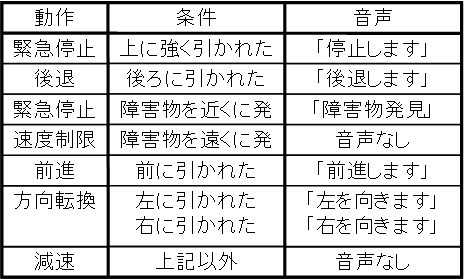
動作条件と音声種別
ひも操作による移動ロボット誘導走行実験(左方向転換後,追従前進)
